Classic AUTOSAR CAN 通信栈源码解析
从 CAN Driver 到 COM、从 PDU 封包到多帧分段、从诊断服务到网络管理状态机,逐层拆解 Classic AUTOSAR CAN 通信栈的设计原理。
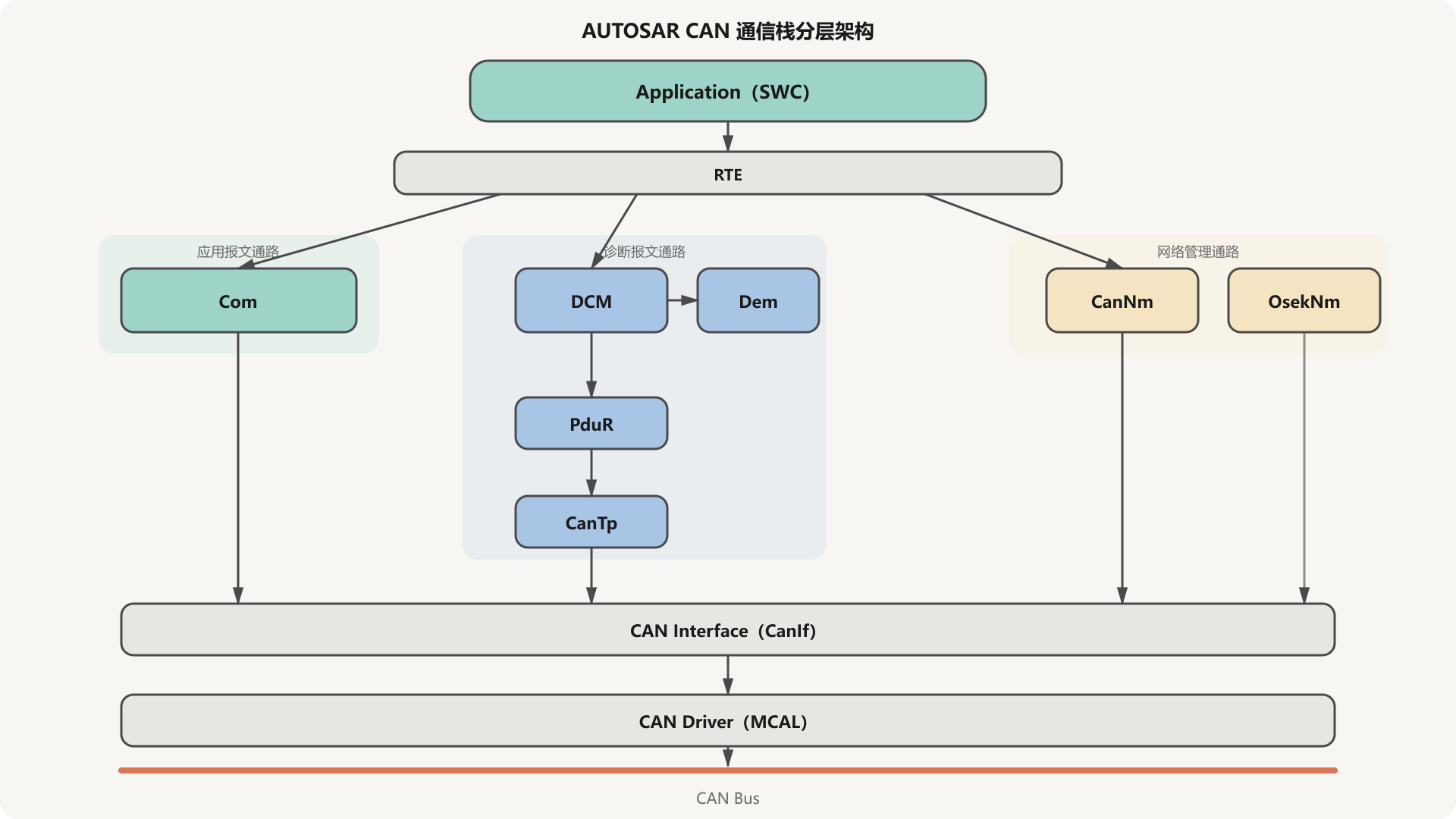
Classic AUTOSAR 的 CAN 通信栈是一个严格的分层架构,从硬件驱动到应用接口一共五层,每一层只关心自己的职责,通过标准化的接口和上下层交互。这种设计让硬件更换不影响上层逻辑,让应用开发者不需要关心底层协议细节。
五层协议栈的数据流
AUTOSAR CAN 通信栈分为五层,每一层只关心自己的职责,通过标准接口和上下层交互。理解数据如何在这些层之间流转,是读懂整个协议栈的钥匙。
CAN Driver:离硬件最近的一层
CAN Driver 直接操作 CAN 控制器硬件,管理消息对象(Hardware Object)的收发。它向上层暴露的只有 Can_Write() 和中断回调,向下直接读写寄存器。
核心数据结构是 Can_PduType,它把一条 CAN 报文抽象为四个字段:
typedef struct
{
PduIdType swPduHandle; /* 逻辑句柄 */
uint8 length; /* DLC */
Can_IdType id; /* CAN ID */
uint8* sdu; /* 数据指针 */
} Can_PduType;
接收方向上,CAN 硬件产生 Rx 中断,中断服务程序从消息缓冲区中提取 ID、DLC 和数据,构造 Can_PduType 后调用 CanIf_RxIndication() 上报。发送方向上,上层调用 Can_Write(),驱动将 PDU 写入硬件发送缓冲区,等待硬件完成发送后通过中断确认。
这一层还管理硬件过滤器的配置。通过 CanFilterMaskRef 字段,可以在硬件层面过滤不需要的 CAN ID,只有匹配的消息才会触发接收中断,减少 CPU 负担。
CAN Interface:硬件抽象与 PDU 映射
CanIf 是 Driver 和上层之间的桥梁,它的核心工作是把硬件相关的 PDU 映射为逻辑 PDU,让上层不需要知道物理细节。
发送路径中,CanIf 收到上层的 CanIf_Transmit() 调用后,根据配置表将逻辑 PDU ID 映射到硬件发送句柄(HTH),解析 CAN ID 类型(标准帧或扩展帧),然后调用 Can_Write() 完成实际发送。
接收路径中,CanIf_RxIndication() 对收到的消息做软件过滤和 DLC 校验,然后根据 CAN ID 查配置表找到对应的上层回调函数,把数据往上抛。这个回调机制是整个协议栈实现层间解耦的关键——上层模块在初始化时注册回调,CanIf 不需要知道上层是谁。
PDU Router:三路分发器
PDUR 是协议栈中的交通警察。CAN 网络上同时跑着三种报文:应用报文、网络管理报文和诊断报文。PDUR 根据配置好的路由表,把收到的 PDU 分发到不同目的地。
从源码中可以看到,PDUR 的实现非常直接——它本质上是一组转发函数:
BufReq_ReturnType PduR_CanTpStartOfReception(PduIdType id,
PduLengthType TpSduLength, PduLengthType* bufferSizePtr)
{
return Dcm_StartOfReception(id, TpSduLength, bufferSizePtr);
}
Std_ReturnType PduR_DcmTransmit(PduIdType DcmTxPduId,
PduInfoType* PduInfoPtr)
{
return CanTp_Transmit(DcmTxPduId, PduInfoPtr);
}
PDUR 只做转发,不修改 PDU 内容。诊断报文走 CanTp → PDUR → Dcm 通道,应用报文走 CanIf → Com 通道,NM 报文走 CanIf → CanNm 通道。这种设计让协议栈的扩展变得简单——新增一种报文类型只需要在 PDUR 的路由表里加一条映射。
CAN Transport Protocol:多帧的分与合
CAN 单帧最多传 8 字节数据,但诊断报文经常超过这个长度。CanTp 负责把长消息拆成多帧发送,在接收端重新拼起来。
CanTp 定义了四种帧类型:
- 单帧(SF):数据 ≤ 7 字节,一帧搞定,PCI 只占第一个字节的高 4 位(
0x0n) - 首帧(FF):多帧的开始,前两个字节是 PCI(
0x1n+ 长度低字节),后 6 字节是数据 - 连续帧(CF):后续数据帧,PCI 为
0x2n,n 是序号(0x01–0x0F 循环),每帧带 7 字节数据 - 流控帧(FC):接收方用来控制发送节奏,包含三种状态:继续发送(CTS)、等待、溢出
以诊断请求 04 2F 67 00 03 01 FF FF 为例,第一个字节 04 是网络层的 PCI,表示单帧、长度 4。从第二个字节开始是应用层内容:2F 是 SID(Input/Output Control),67 00 是 DID,03 01 是子功能。
接收状态机由 CanTp_RxStateType 管理,ChannelState 追踪当前处于 Idle / WaitFF / WaitCF 等阶段,ExpectedSN 校验连续帧序号的连续性,BlockSize 和 STMin 实现流控参数协商。
COM:信号级的收发管理
Com 层是通信栈中离应用最近的一层。它不直接操作 PDU,而是把 PDU 中的数据进一步拆解为信号(Signal),提供信号级的读写接口。
信号的定义非常精巧。以一个接收消息为例:
typedef struct MsgBCM_BCAN_1_msgTypeTag
{
uint8 BCM_KeySt : 2;
uint8 unused0 : 6;
uint8 BCM_ParkingLampSt : 1;
uint8 unused3 : 1;
uint8 BCM_ReverseSwitchSt : 1;
uint8 unused4 : 5;
/* ... */
} MsgBCM_BCAN_1_msgType;
typedef union MsgBCM_BCAN_1_bufTag
{
MsgBCM_BCAN_1_msgType MsgBCM_BCAN_1;
uint8 _c[8];
} MsgBCM_BCAN_1_buf;
位域结构体精确描述了每个信号在 8 字节 CAN 数据中的位位置。union 让同一块内存既可以按信号名访问,也可以按字节数组访问。应用层拿到数据后,通过宏直接读取信号值:
#define COM_ReceiveSigBCM_KeySt (RxMsgBCM_BCAN_1.MsgBCM_BCAN_1.BCM_KeySt)
发送方向上,应用设置信号值后,Com 层根据消息的传输属性(周期发送、事件触发、混合模式)决定何时将整个消息组装好并通过 CanIf_Transmit() 发出。
接收方向上,Com 层负责超时监控。如果某条周期消息在规定时间内没收到,Com 会调用超时回调通知应用,应用据此判断发送节点是否离线。
PDU 与 SDU:封包的本质
理解协议栈中数据封装的关键是 PDU 和 SDU 的关系。对于第 n 层而言,上层(n+1)传下来的数据就是 SDU(Service Data Unit),第 n 层给它加上自己的控制信息(PCI),封装成 PDU(Protocol Data Unit),然后传给下一层。
拿 DCM 层的诊断数据举例:DCM 接收到的完整 Service Message 称为 I-PDU,保存到 Buffer 后交给 PDUR 层转发。数据到达 CanTp 层后称为 N-SDU,加上 PCI 变成 N-PDU。超过 7 字节时拆成多个 N-SDU,每个加 PCI 变成独立的 N-PDU。
数据从应用层往下每经过一层,就多一层控制信息封装;从底层往上每经过一层,就剥掉一层控制信息。 这就是 AUTOSAR 通信栈最核心的设计模式。
诊断栈:DCM 与 Dem
诊断功能是 AUTOSAR 协议栈中最复杂的部分之一。DCM(Diagnostic Communication Manager)负责处理 UDS 诊断请求,Dem(Diagnostic Event Manager)负责管理故障码(DTC)。
DCM 层维护两套诊断缓冲区,分别处理物理寻址和功能寻址的请求:
uint8 gUDS_Physical_DiagBuffer[UDS_PHYS_BUFFER_SIZE];
uint8 gUDS_Functional_DiagBuffer[UDS_FUNC_BUFFER_SIZE];
当诊断请求到达 DCM 时,DCM 将每个字节解析出来,根据 SID 分发到对应的服务处理函数。以 0x2F 服务(IO 控制)为例,DCM 根据 DID 查表找到对应的控制回调,可能是请求节目源切换,也可能是调节媒体音量——具体动作由应用层实现。
当 ECU 检测到故障时,Dem 将故障信息以数字代码的形式记录下来。这些 DTC 存储在非易失性存储器中,诊断仪通过 0x19 服务读取。
网络管理:让节点知道彼此的存在
CAN 网络上的节点需要一种机制来协调睡眠和唤醒,这就是网络管理。协议栈实现了两种网络管理方案。
直接网络管理(OsekNm) 基于 OSEK/VDX NM 协议。每个节点有一条专属的网络管理报文,节点自动组成逻辑环,NM 报文按环的顺序依次发出。如果一个节点在规定时间内没收到上一个节点的报文,就认为对方离线。逻辑环的确定性让故障定位变得简单——没收到谁的报文,就是谁出了问题。
AUTOSAR CAN NM(CanNm) 是更现代的实现,基于状态机管理网络生命周期。定义了多种状态:Normal Operation(正常通信)、Repeat Message(节点检测)、Bus Sleep(低功耗休眠)、Limp Home(降级运行)。
CanNm_TimerType 管理一组定时器——消息周期、网络超时、重复消息、等待总线休眠——在 CanNm_MainFunction() 中周期检查。
间接网络管理则没有专用的 NM 报文,而是通过各节点发出的周期性应用报文来检测在线状态。如果某个节点的周期消息超时未到,就认为该节点已离线。COM 层的接收超时监控就是间接网络管理的一种实现。
BusOff:最严重的总线故障
BusOff 是 CAN 通信中最严重的故障状态——控制器因为累计发送错误过多,被硬件自动从总线上断开。
BusOff 的处理流程分为检测和恢复两步。当硬件检测到 BusOff 状态时,触发中断,中断服务程序先将控制器切换到 STOP 状态,然后通过 CanIf_ControllerBusOff() 向上层通知:
static void CAN_Controller_Busoff_handler(uint8 Controller)
{
Can_SetControllerMode(Controller, CAN_T_STOP);
CanIf_ControllerBusOff(Controller);
}
CanIf 收到通知后,向上传播到 CanNm 的 CanNm_BusOff() 回调。网络管理模块将 BusOff 计数器加 1,并设置故障标志位。当 BusOff 次数累计超过阈值,就会标记总线错误并设置 DTC 检测完成标志。
恢复过程:重新初始化 CAN 控制器,然后切换回 STARTED 模式。恢复策略通常采用递增延时——第一次恢复等待较短时间,后续每次失败等待时间加倍,避免在总线持续故障时频繁重连。
理解了这套分层架构,再去看任何 Classic AUTOSAR 的通信问题,都有了定位的锚点:数据在哪个方向(Tx 还是 Rx),经过了哪些层,每一层做了什么。这是读协议栈最有用的思维框架。